En esta ocasión nos encontramos a Carlos y Lorenzo hablando en el emplazamiento de las futuras instalaciones hidroeléctricas. Al acercarnos comenzamos a escuchar la conversación.
- Como podrás ver Lorenzo, la zona es perfecta para nuestros intereses. Podremos hacer todas las instalaciones sin ningún tipo de inconveniente y la central comenzará a producir.
- Si, me gusta mucho la zona y sus posibilidades. Siento ser pesado... ya sé que me explicaste el sistema de generación de energía, pero ¿y todas esas máquinas intervinientes no necesitarán algún sistema de control?
- Claaaaro, no se preocupe ... está todo pensado. Voy a exponerle la situación.
Una máquina es un conjunto de elementos móviles y fijos cuyo funcionamiento posibilita aprovechar, dirigir, regular o transformar energía, o realizar un trabajo con un fin determinado. Se denomina maquinaria al conjunto de máquinas que se aplican para un mismo fin y al mecanismo que da movimiento a un dispositivo.
- Nosotros generaremos electricidad a partir del agua, de ahí el nombre de central hidroeléctrica. Entonces, tenemos las turbinas conectadas a los generadores, los cuáles; transforman la energía mecánica proveniente del movimiento que arrastra las turbinas en energía eléctrica.
- Pero esa energía eléctrica ¿no la utilizaríamos directamente?
- No, me temo que no. Primero, hay que transformarla a las tensiones normalizadas y por esta razón, necesitamos transformadores específicos, ya que la potencia a transformar condicionará directamente el tamaño de los mismos.
- Entonces, así si conseguiríamos la tensión adecuada para funcionar en la fábrica o en nuestros hogares.
- Exacto. De esta manera, los motores funcionan en las condiciones óptimas, cosa que no pasaría si la tensión es más baja (irían más lentos) o más alta (se podrían quemar).
A lo largo de esta unidad, llamaremos máquina eléctrica a todo dispositivo capaz de transformar cualquier forma de energía en energía eléctrica o a la inversa y también se incluyen en esta definición las máquinas que transforman la electricidad en la misma forma de energía pero con una presentación distinta más conveniente a su transporte o utilización. Se clasifican en tres grandes grupos: generadores, motores y transformadores.
Los generadores transforman energía mecánica en eléctrica, mientras que los motores transforman la energía eléctrica en mecánica haciendo girar un eje. El motor se puede clasificar en motor de corriente continua o motor de corriente alterna. Los transformadores y convertidores conservan la forma de la energía pero transforman sus características.
Desde una visión mecánica, las máquinas eléctricas se pueden clasificar en rotativas y estáticas.
Las máquinas rotativas están provistas de partes giratorias, como las dinamos, alternadores, motores.
Las máquinas estáticas no disponen de partes móviles, como los transformadores.
Aunque menos conocida, existe un tipo de máquina con partes móviles y no es rotativa, son los llamados motores lineales.
2.- Generadores
Caso práctico
- Entonces, como le iba diciendo; la generación de energía eléctrica la conseguimos a través de las turbinas conectadas a los generadores.
- Si, los generadores son como motores¿no?. Aunque, tenía entendido que hay diferentes tipos.
- Exactamente, son como motores. Un motor podemos hacerlo trabajar como motor si le damos electricidad y lo podemos hacer trabajar como generador si movemos su eje mecánicamente. Es algo más complejo, pero en esencia funciona así.
- Y ¿por qué no se fabrican sólo motores consiguiendo abaratar los costes?
- La idea en sí es posible, pero hay que tener en cuenta los rendimientos. Si fabricamos un motor, por supueso funcionará muy bien como motor, pero ... al utilizarlo como generador no resultará igual de eficiente. Pasa lo mismo con los generadores, o con nosotros mismos, si nos especializamos en una cosa, aunque podamos hacer otras, siempre haremos mejor aquella en la que tengamos más experiencia.
- Lo entiendo, pero lo de los tipos…
Funcionamiento de un generador de corriente¿Cómo funciona un generador?
En la siguiente tabla se analizan los principios, las leyes y las reglas elementales en las que se basa el funcionamiento de un generador eléctrico:
Máquina
Principio de funcionamiento. Leyes
Expresiones
Reglas
Generador
Produce una fem por variación de flujo magnético en un circuito en movimiento. esta producción tiene lugar mientras los conductores eléctricos corten líneas de fuerza del campo magnético. El valor de la fem inducida depende del número de espiras de la bobina y de la velocidad de variación del flujo con respecto al tiempo.
Si son los conductores los que se mueven en el seno de un campo magnético fjo, se habla de dinamo, mientras que si es el campo magnético el que se mueve mientras los conductores permanecen fijos, se habla de alternador.
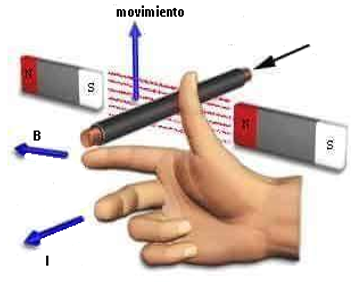
Ley de Faraday. Cuando se desplaza un conductor eléctrico en el seno de un campo magnético, aparece una fem o diferencia de potencial entre los extremos de dicho conductor.
Ley de Lenz (principio general de acción y reacción). El sentido de la corriente inducida en un conductor es tal que tiende a oponerse a la causa que la produjo.
La fuerza electromotriz inducida en un conductor es:
La fem inducida en una bobina es:
Donde:
B : inducción magnética (T)
l: longitud del conductor (m)
v: velocidad (m/s)
N: número de espiras
: variación del flujo con respecto al tiempo
Como ya sabes, un generador eléctrico convierte energía mecánica en energía eléctrica, pudiendo distinguir los siguientes tipos:
Tipos de generadores en función del tipo de corriente "alterna" o "continua", su denominación y sus características más destacables
Tipo de corriente
Denominación generador
Características
Continua
Dinamo o generador de CC:
Con excitación externa.
En Serie.
En Derivación .
Compuesto acumulativo.
Compuesto diferencial.
Internamente genera en corriente alterna, pero al pasar por el colector de delgas y escobillas, se convierte en continua. Los diferentes tipos tienen que ver con la excitación y conexión del los bobinados del estator y de rotor.
Alterna
Alternador o generador síncrono.
Tiene el rotor bobinado, el rotor y estator tienen obligatoriamente el mismo número de polos magnéticos, la frecuencia es directamente proporcional a la velocidad mecánica, se puede controlar la tensión, frecuencia y las potencias P y Q , así como el balance de cargas si se acoplan varios en paralelo.
Alternador o generador asíncrono.
Generan P y Q siempre inductiva, no pudiendo controlar la frecuencia ni la tensión de generación. El rotor es de jaula de ardilla y por lo tanto el nº de polos del rotor se adaptan a los del estator (siempre tienen que ser iguales).
Mixtos
Conmutatriz
Convertidor de energía eléctrica de tipo alterna en continua o viceversa. Puede ser motor o generador.
En la tabla anterior sólo se indican los generadores relacionados con las centrales eléctricas. Existen otros tipos, como los generadores eléctricos por conversión de energía química, por ejemplo la "pila de combustible" y otros que se escapan al objeto de esta unidad.
Para saber más
En el siguiente vídeo podemos darnos cuenta que el movimiento del agua puede generar electricidad, y no necesariamente necesitamos grandes caudales o grandes saltos de agua.
Los generadores sincrónicos o alternadores son máquinas sincrónicas que se usan para convertir potencia mecánica en potencia eléctrica de corriente alterna (AC). El término síncrono indica que las velocidades de rotor y estator están intrínsecamente relacionadas, o dicho de otra forma, la frecuencia de las tensiones y corrientes es directamente proporcional a la velocidad del rotor según:
Si en un generador sincrónico se aplica al bobinado del rotor una corriente continua, se producirá un campo magnético en el rotor. Entonces, el rotor del generador se impulsará por medio de un motor primario (diesel, turbina de vapor, aspas aerogenerador, etc), lo cual producirá un campo magnético rotatorio dentro de la máquina. Este campo magnético rotatorio, inducirá un sistema trifásico de voltajes dentro del bobinado del estator del generador.
Wikipedia. Rotor o inductor de un generador de gran potencia(CC0)
El rotor de un generador sincrónico es esencialmente un gran electroimán. Los polos magnéticos del rotor pueden ser de construcción saliente o no saliente. Los rotores de polo no saliente se usan normalmente para rotores de dos y cuatro polos, mientras que los de polo saliente se utilizan normalmente en rotores de cuatro o más polos.
Un flujo de un generador de corriente continua (DC) debe alimentar el circuito de campo del rotor. Puesto que éste está girando, se necesita un dispositivo especial para llevar la alimentación de DC a su bobinado de campo. La forma habitual de alimentar el rotor es por medio de anillos rozantes y escobillas.
La diferencia fundamental de rotores de generadores síncronos y asíncronos es que en los primeros disponemos de anillos rozantes y escobillas, ya sean 2 si alimentamos con DC o 3 si alimentamos con trifásica, y en los asíncronos no tienen anillos rozantes, es decir, el rotor es de jaula de ardilla.
Para saber más
En el siguiente blog, podemos introducirnos más hondamente en el generador síncrono, sus características y regulaciones entre otras.
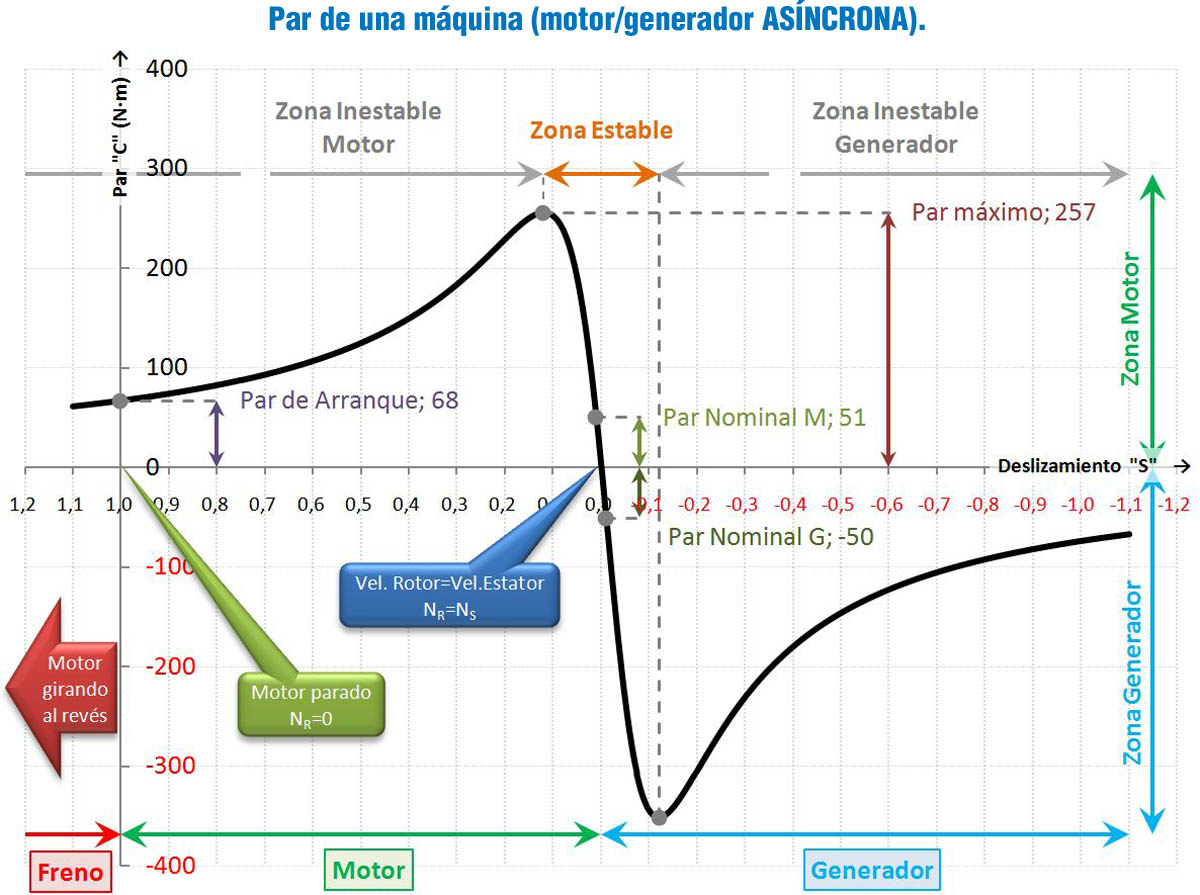
¿Sabías que un generador es asíncrono cuando la velocidad del rotor no es igual a la velocidad de los polos magnéticos del estator? Un generador asíncrono, como máquina eléctrica reversible, es igual que un motor asíncrono. Un ejemplo típico es un motor de inducción o jaula de ardilla, que en lugar de frenarlo y sacarle energía mecánica, lo que se hace es acelerarlo. De esta forma, convierte energía mecánica en energía eléctrica.
En la ilustración se puede observar el comportamiento de una máquina asíncrona. Si el deslizamiento (S) es positivo (rotor girando más despacio que rotor) la máquina se comporta como un motor, y si el deslizamiento es negativo la máquina se comporta como un generador.
Los aerogeneradores más simples están construidos con generadores asíncronos. Dicho de otra forma, los generadores son simples motores de toda la vida que al aplicarles un par mecánico comienzan a funcionar como generadores. Ese par mecánico se obtiene del rotor tripala que, a través de la caja multiplicadora se obtiene una velocidad mayor del rotor que la de los polos del estator y simplemente genera.
Estos generadores no controlan ni la tensión ni la frecuencia generada, no pueden, y son fijadas por la red. Ello significa que este tipo de generador no puede funcionar en isla, es decir, necesitan conexión con el exterior para tomar referencia de tensión y frecuencia y además para entregar la energía generada.
Si la máquina es de rotor con jaula de ardilla, al no tener conexión el rotor con el exterior, son máquinas simples, con pocas averías y de fácil mantenimiento.
Para saber más
En el siguiente enlace, podemos dirigirnos a un sitio web perteneciente a la wikipedia pero orientado a electricistas que puede resultarnos de utilidad para ilustrar contenidos con un mayor rango de complejidad. Sin embargo, el segundo enlace nos deriva al mismo sitio web pero concerniente a las diferencias entre motores síncronos y asíncronos.
En la actualidad, la generación de corriente continua se realiza con pilas y acumuladores o bien mediante la conversión de CA a CC con rectificadores. Las dinamos tienen aplicaciones muy específicas, como excitatrices para alternadores, tacodinamos, convertidores rotativos, ...
Una dinamo consta de un inductor (encargado de crear un campo magnético fijo) que puede ser un imán permanente o un electroimán, situado en el estator, y un inducido, ubicado en el rotor, donde se induce la fem. Las distintas secciones del devanado del inducido se conectan entre sí a través de las delgas o láminas conductoras situadas en el colector de delgas, sobre el que rozan las escobillas, encargadas de transmitir la energía eléctrica generada hasta los bornes de la máquina. Al hacer girar el rotor -mediante una turbina u otro dispositivo giratorio-, se genera en el devanado del inducido una fem.
El conjunto formado por el colector de delgas y las escobillas constituye un rectificador rotativo que permite que en los bornes de la dinamo se disponga de una corriente pulsante o continua (si el número de secciones es elevado).
Construcción de un generador de corriente alterna y continua
Debes conocer
Diferencias entre un generador de corriente alterna y uno de corriente continua.
La producción de energía electrica se realiza en las centrales eléctricas mediante el alternador trifásico, una máquina eléctrica síncrona que transforma en corriente alterna la energía mecánica aportada por una turbina.
El inductor de esta máquina suele encontrarse en el rotor y está compuesto por cierto número de electroimanes alimentados con CC, que producen un campo magnético giratorio, cuyas líneas de fuerza, al atravesar los conductores de las bobinas del inducido (tres bobinas desfasadas geométricamente 120º), situadas en el estator, inducen en ellas fuerzas electromotrices de tipo senoidal desfasadas entre sí 120º.
Después de estar hablando de generadores... la energía tiene que ir a algún sitio. Sin embargo, los generadores normalmente para obtener la mejor eficiencia no trabajan a las tensiones que están normalizadas, por lo que tenemos que conseguir una tensión adecuada, para ello necesitamos utilizar transformadores.
- Todo esto que me ha explicado, está muy bien Honestamente, casi no me acordaba de nada.
- Es normal, no se preocupe. Nos pasa a todos, en cuanto dejamos apartado un tema durante unos meses o años, prácticamente lo olvidamos.
- Si, es verdad. Si seguimos la ruta de la creación de la electricidad, después del generador llegamos a los transformadores, ¿dónde está prevista su instalación?
- La zona de los transformadores está junto a la central, en una zona apartada hacía la derecha. Aunque en nuestro caso, tenemos dos transformadores; uno para convertir la energía que generamos y el otro para convertir la energía que compramos.
- Cierto, ya me comentaste el otro día que nuestro caso es especial, ya que vamos a utilizar unas bombas de agua para acumular agua (energía) en la presa.
- Exacto, la idea es aprovechar que ya tenemos la instalación del suministro eléctrico del pueblo, así tenemos energía en el caso de alguna sequía o cuando queramos acumular energía, compramos en alta tensión que es más barato y así ahorramos un poco más.
Función de los transformadores.
La función principal de los transformadores de tensión es adaptar los niveles de tensión de un circuito a los que necesita otro, por ejemplo, la lámpara halógena del pasillo de casa lleva un trafo de 230/12V , porque la tensión de casa es de 230Vac y la lámpara funciona a 12Vac.
Los transformadores de corriente tienen dos propósitos:
Si las corrientes son muy elevadas en el circuito a medir, transforman esas elevadas corrientes en otras mucho más pequeñas y proporcionales, medibles por los aparatos convencionales. Por ejemplo, un trafo de intensidad 4000/5A , cuando por el primario pasan 4000A por el secundario sólo 5A; con 2000A en primario pasarían 2,5A en secundario, etc.
Si la corriente a medir está en un circuito de alta tensión, por seguridad no se puede medir con aparatos convencionales. En este caso, además de tener la relación de transformación que necesitan ahora su función principal es la de aislamiento galvánico que proporcione seguridad.
Existen múltiples aplicaciones del transformador en la actualidad, piensa si quieres en lo que utilizas cuando pones a cargar tu teléfono móvil, pero una de las primeras fue dotar a los primeros automóviles de un sistema de encendido que hiciera saltar una chispa eléctrica en la bujía, capaz de iniciar la combustión de la mezcla aire-combustible.
3.1.- Principio de funcionamiento de un transformador
En conclusión, se denomina con este nombre a la máquina eléctrica estática cuya función es transformar el nivel de tensión para adaptarse a la tensión de utilización o bajar la corriente para minimizar pérdidas.
¿Cómo funciona un transformador?
Para saber más
Sitio web de educativa, dónde podemos ver una explicación más redactada paso a paso para ilustrar el funcionamiento de un transformador y material ampliado sobre otras secciones relevantes del mismo.
Transformadores elevadores: Este tipo de transformadores nos permiten, como su nombre indica, elevar la tensión de salida con respecto a la tensión de entrada. Muy utilizados en centrales eléctricas, porque se genera energía a tensiones bajas y se eleva para poder transportarla con pocas pérdidas en las líneas eléctricas.
Autotransformador: Con un solo bobinado, sin aislamiento galvánico, se utiliza principalmente en el arranque de motores eléctricos, conectando el estator del motor al secundario del transformador.
Transformador de aislamiento: Proporciona aislamiento galvánico entre el primario y el secundario, de manera que consigue una alimentación o señal "flotante". Suele tener una relación 1:1 . Se utiliza principalmente como medida de protección, en equipos que trabajan directamente con la tensión de red.
Transformador de alimentación o de potencia: Pueden tener una o varias bobinas secundarias y proporcionan las tensiones necesarias para el funcionamiento del equipo. También adaptan tensiones de líneas diferentes.
Transformador trifásico: Tienen tres bobinados en su primario y tres en su secundario. Pueden adoptar forma de estrella (Y) (con hilo de neutro o no) en delta -triángulo- o zig-zag y las combinaciones entre ellas. A estas combinaciones se les llama índice horario o grupo de conexión, que veremos más adelante. Hay que tener en cuenta que aún con relaciones 1:1, al pasar de Δ a Y o viceversa, las tensiones de fase varían.
Transformador de pulsos: Es un tipo especial de transformador con respuesta muy rápida (baja autoinducción) destinado a funcionar en régimen de pulsos y además de muy versátil utilidad en cuanto al control de tensión 230 V. Muy utilizados en los convertidores de frecuencia actuales.
Transformador electrónico: Está compuesto por un circuito electrónico que eleva la frecuencia de la corriente eléctrica que alimenta al transformador, de esta manera es posible reducir drásticamente su tamaño. También pueden formar parte de circuitos más complejos que mantienen la tensión de salida en un valor prefijado sin importar la variación en la entrada, llamados fuente conmutada.
Transformadores de medida: Entre los transformadores con fines especiales, los más importantes son los transformadores de medida para instalar instrumentos, contadores y relés protectores en circuitos de alta tensión o de elevada corriente. Los transformadores de medida aíslan los circuitos de medida o de relés, permitiendo una mayor normalización en la construcción de contadores, instrumentos y relés.
Como ya te imaginarás, tambien existen algunos transformadores con alguna característica que los hacen especiales, o de uso poco común como los transformadores de medida de tensión, de medida de corriente, para alimentación de variadores de frecuencia en grandes potencias o secos para parques eólicos.
Para saber más
En los enlaces siguientes encontrarás accesos a portales de fabricantes de trafos especiales.
Como ya te imaginarás, todas las características que definen un transformador tienen que estar plasmadas en una placa de características. Las normas de referencia que definen qué y cómo se identifican son la IEC 76 (CEI 60076) y la UNE 20101 para los de potencia, la CEI 60044 para los de medida de corriente.
Debes conocer
Como ya sabeis, os adjunto un enlace a un sitio web par consultar sobre la Placa de datos de transformadores dónde constan los diferentes apartados a describir y que deben constar en la placa de un transformador y un video para obtener un mayor grado de detalle por si restan dudas. Por otro lado, os adjunto un ejemplo resuelto junto al cálculo del rendimiento.
4.- Motores eléctricos
Caso práctico
Siguiendo el paseo por las futuras instalaciones, se acercan a la ubicación de la nueva y novedosa fábrica; la cual será alimentada integramente por la presa.
- Ahora que nos hemos alejado un poco de la presa, no era sólo por dar un paseo, sino para que pueda visualizar cómo quedará la nueva empresa aquí integrada.
- Aquí, ... aquí
- Si, ahora mismo estamos aproximadamente en el centro. No nos alejamos mucho del punto de generación de la energía, para poder evitar pérdidas en el transporte de la electricidad.
- Pero ... según tengo entendido, esta industria no necesita mucha electricidad, ¿no? Por lo que podremos alimentarla con baja tensión.
- Ya, dispondremos de baja tensión trifásica a 400V y monofásica a 230V. La ventaja resulta en que el transporte lo haremos a 400V, porque estamos sólo a unos metros de la generación y luego utilizaremos los transformadores para cada motor.
- Sin embargo, ¿no sería mejor utilizar todos los motores a 400V? y así a la hora de reemplazarlos sería más económico, no necesitando transformadores.
- La verdad es que dependiendo de la potencia del motor, utilizaremos una tensión u otra, pero no podemos poner los mismos motores a todo. Cada máquina requiere unos motores específicos para incrementar su durabilidad en lo máximo posible. Si ponemos un motor pequeño para una máquina grande, se nos quemaría, si ponemos un motor grande en una máquina pequeña, estaríamos desperdiciando sus propiedades e incluso podría llegar a funcionar mal, al no trabajar en las condiciones especificadas por el fabricante. Con esta práctica, los fallos son más habituales, por supuesto ... siempre hay algo de margen.
- En definitiva, tendremos que utilizar motores de distintas clases y características, incluso los de continua.
- Si, básicamente nuestro proyecto englobará los tres tipos de motores principales que existen.
¿Os imagináis cómo sería nuestra vida sin motores eléctricos? no solamente a nivel industrial (cintas transportadoras, taladradoras, etc), sino también en el ámbito doméstico: ¿cómo arrancaríamos el coche sin el motor de arranque? ¿y la lavadora? ¿y la batidora?
Pero qué me decís de los generadores: ¿cómo obtendríamos la energía eléctrica?
Como puedes apreciar, este tema, en el que se estudian este tipo de máquinas es fundamental no sólo dentro del margen de contenidos definidos, sino para conocer cómo funcionan la mayoría de máquinas que usamos diariamente.
Tipos de motores eléctricos.
Según el tipo de corriente: de alterna o de continua.
Según el tipo de circuito: Monofásico o trifásico, siempre referido al estator.
Según el tipo de rotor: de jaula, de rotor bobinado monofásico o de rotor bobinado trifásico.
Según la velocidad: de una sola velocidad, de dos velocidades o de varias velocidades.
4.1.- Funciones y constitución
Funciones generales de los motores eléctricos.
La funciones principales de los motores eléctricos, sean de continua; alterna monofásica o trifásica, es producir un movimiento mecánico que pueda realizar una determinada tarea. Ese trabajo, que como sabes es potencia por tiempo, lo realiza el motor absorbiendo energía eléctrica de la red y transformándola en energía mecánica útil.
Fíjate en tu entorno, ¿qué aparatos tienen motores eléctricos? y ¿cuál es su misión?, por ejemplo: La lavadora tiene el que mueve el bombo y la bomba de vaciado; la nevera el del compresor que presuriza el gas refrigerante, el ascensor tiene el de elevación, el de apertura-cierre de las puertas y algunos incluso en que desfrena la cabina.
Partes fundamentales de un motor eléctrico.
En las dos ilustraciones siguientes podrás observar las partes fundamentales de dos tipos de motores de alterna. A la izquierda uno de inducción o jaula de ardilla, el más común, y a la derecha un de rotor bobinado. Fundamentalmente tienen:
Estator: es la parte inmóvil, fija.
Rotor: parte que gira, normalmente dentro del estator.
Entrehierro: es el espacio libre que queda entre el estator y el rotor y que permite el giro de éste último. Debe ser muy reducido, lo máximo posible, para evitar que se pierda flujo magnético.
Colectores y escobillas: las escobillas realizan la conexión de los circuitos del rotor con los del estator. Son de grafito. Las escobillas frotan sobre unas láminas conductoras (delgas) que están acopladas a un dispositivo cilíndrico denominado colector.
Estas máquinas están constituidas por dos circuitos eléctricos y uno magnético. Los circuitos eléctricos se encuentran en el rotor y en el estator respectivamente. A estos circuitos se les denomina devanados. Uno de ellos, produce la fuerza electromotriz que crea el flujo en el circuito magnético de la máquina, por ésto se le denomina devanado inductor. En el otro circuito eléctrico se induce una fuerza electromotriz que produce un par motor (en el caso de que esté funcionando como motor) o una fuerza contraelectromotriz (si está funcionando como generador). A este devanado se le denomina inducido.
Puesta en marcha de un motor a impulsos, enlace de descarga directa para abrir con Internet Explorer.
4.2.- Motores de corriente continua
Su constitución es idéntica a la del dinamo. Se trata de una máquina reversible que puede funcionar indistintamente como generador o como motor. Cuando la corriente recorre los conductores del devanado del inducido, se produce un apr de giro en el rotor. El colector de delgas se encarga de invertir el sentido de la circulación de la corriente en las espiras al pasar por el plano neutro y, con ello, de mantener el sentido de giro del rotor. Estos motores poseen un par de arranque elevado y su velocidad se puede regular con facilidad, por lo que resultan muy útiles en vehiculos de tracción eléctrica (trenes, tranvias, ...). Un ejemplo de su aplicación actual son las palas de los aerogeneradores, las cuales, son reguladas con motores de corriente continua accionados por un variador de continua y baterías de seguridad.
Entonces, vamos a recordar, el fundamento de los convertidores electromagnéticos está basado en 3 principios fundamentales de la inducción electromagnética, que conocemos perfectamente:
La intensidad que circula por un conductor arrollado sobre un núcleo de hierro, hace que éste se comporte como un imán.
La interacción de una corriente eléctrica y un campo magnético produce fuerzas a distancia.
Cuando se mueve un conductor en el seno de un campo magnético, se induce en él una f.e.m.
Os adjunto un video, dónde se explica de forma general el funcionamiento de un motor en corriente continua con extensas animaciones sobre su diseño, construcción y su uso que pueden mejorar su conocimiento de este dispositivo.
Fundamentos de un motor de corriente continua
Debes conocer
Principio de funcionamiento de un motor de corriente continua. Os adjunto un enlace externo más desarrollado y con mayor grado de detalle.
Los motores de corriente alterna asíncronos son los más utilizados en la actualidad, debido a su excelente rendimiento, fácil mantenimiento y sencillez de construcción. Tambien se emplean, aunque en menor grado y en aplicaciones específicas, los motores síncronos, en los cuales el rotor gira a la misma velocidad que el campo magnético giratorio.
Motores asíncronos
Constitución: Como todas las máquinas rotativas, consta de una parte fija llamada estator y de una parte móvil llamada rotor. En el estator están colocadas las bobinas que generan un campo magnético giratorio. En el rotor se coloca un bloque de chapas ferromagnéticas ranuradas, sobre las que se inyecta aluminio, formando unas espiras en cortocircuito denominadas jaula de ardilla.
Supongamos un estator elemental, formado por tres espiras desfasadas 120o, a la que se les aplica una corriente trifásica. Cada corriente genera un campo magnético y un flujo en su espira.
Combinando los flujos magnéticos de las espiras se obtiene uno principal. Se observa que el flujo total es constante en valor a lo largo del tiempo, pero que va girando conforme avanza la secuencia de fases.
En esta máquina elemental, si la frecuencia es 50Hz, hace un ciclo en 0,02 segundos, que es el tiempo que tarda en girar el flujo, es decir, la velocidad de giro del flujo es de 50 revoluciones por segundo o 3000 rpm. Esta máquina elemental tiene un par de polos por espira. A la velocidad del flujo se le denomina velocidad de sincronismo y se relaciona con la frecuencia y el número de pares de polos de la máquina.
Un motor asíncrono tiene un número de polos par, el número de pares de polos puede ser 1, 2,3, 4.... Y las velocidades de sincronismo correspondientes son:
P
1
2
3
4
5
6
n (rpm)
3000
1500
1000
750
600
500
El campo magnético giratorio induce unas corrientes en el rotor. Estas corrientes en combinación con el campo magnético generan (inducen) una fuerza y un par que hace girar el motor en el mismo sentido que lo hace el flujo magnético.
El rotor sigue al campo magnético, pero nunca gira a la misma velocidad que él, ya que si lo hiciera, no se induciría corriente en el rótor y no se generaría par de giro.
Para vencer las fuerza de rozamiento de debidas a los rodamientos y a la ventilación, es preciso que se genere un par y que la velocidad del rotor sea inferior a la del flujo.
Como el rotor nunca gira a la velocidad de sincronismo, estos motores se llaman asíncronos. La velocidad es próxima a la de sincronismo, pero no igual. Es más próxima cuanto menor sea el par resistente que tenga que vencer. Será máxima en vacío y menor a potencia nominal.
Para saber más
Un variador de frecuencia es un sistema para el control de la velocidad rotacional de un motor de corriente alterna (AC) por medio del control de la frecuencia de alimentación suministrada al motor.
Os adjunto dos ejemplos interactivos de variadores de frecuencia, su actuación para con un Depósito y un sistema de aire acondicionado en un Colegio.
4.3.1.- Motores trifásicos
Hemos hablado de ellos en muchos otros puntos anteriores. Podemos encontrar motores trifásicos desde 0,75 kW hasta de varios megavatios.
A partir de unos 5 kW es difícil encontrar motores comerciales monofásicos, utilizando casi obligatoriamente motores trifásicos a partir de esta potencia. La explicación es sencilla, son más eficientes los trifásicos porque para la misma potencia consumen menos corriente de cada fase, porque consumen de 3 fases en lugar de una sola. Otra razón de peso es que, si utilizamos motores monofásicos, podemos sobrecargar mucho una fase con respecto a las otras dos, y ya sabes que esto desequilibra las líneas y los transformadores eléctricos y eso ni es eficiente ni lo permiten las compañías suministradoras.
Los motores trifásicos son cargas equilibradas, que consumen energía reactiva de carácter inductivo. Es fundamentalmente por esta razón que las compañías eléctricas prefieren que utilicemos motores trifásicos en lugar de monofásicos, porque así no desequilibramos sus líneas ni transformadores, no saltarán las protecciones por sobrecarga de una sola líneas, etc.
Todos los motores, bien sean monofásicos o trifásicos, tienen un pico de corriente en el arranque que suele ser de 5 a 7 veces la corriente nominal si el arranque es directo.
Debes conocer
"Hay una fuerza motriz más poderosa que el vapor, la electricidad y la energía atómica: la voluntad." Web de Tecnología Eléctrica, con innumerables recursos tanto prácticos como teoricos que os pueden servir de guía o de complemento.
Existen de tres tipos, de inducción, con espira de sombra y universales.
Motor de inducción monofásico:
Está formado por dos bobinados, uno principal y otro llamado de arranque. Para que se cree un campo magnético giratorio es necesario que se creen dos corrientes desfasadas 90o. Esto se consigue conectando un condensador en serie con el bobinado de arranque, tal como se muestra en la figura:
El bobinado principal, por el que circula I2, tiene una resistencia baja y el devanado de arranque, por el que circula I1, tiene una resistencia elevada. Ambas corrientes desfasadas 90o, crean un flujo magnético giratorio. Para cambiar el sentido de giro, es necesario cambiar la conexión de la fase.
Motor de inducción con espira de sombra:
Wikipedia. Motor de inducción con espira de sombra(CC0)
Estos motores tienen un bobinado principal y otro secundario formado por dos espiras en cortocircuito. El bobinado principar genera un flujo magnético e induce una fuerza electromotriz y una corriente en la espira de sombra, creando otro flujo magnético desfasado 90o con el principal. La combinación de los flujos genera un campo magnético giratorio, que hace girar el rotor. Los campos magnéticos no son iguales ni perfectamente desfasados 90o, pero el motor funciona.
Estos motores los podemos encontrar en las bombas de desagüe de la lavadora.
Motor universal:
La mayoría de los pequeños electrodomésticos y máquinas herramientas están equipados con un motor denominado universal, que puede alimentarse indistintamente con CC o CA.
Su constitución es muy similar a la de un motor de corriente continua de excitación serie, es decir, en el que el inductor y el inducido están conectados en serie. Por ello, cuando lo alimentamos con CA, se invierte el sentido de la corriente en los dos devanados a la vez y el sentido de giro no cambia.
5.- Dispositivos de mando y regulación
Caso práctico
- Continuando con la conversación que dejamos a medias y la necesidad de los distintos tipos de motores, mi siguiente duda es ¿cómo controlamos los mismos?
- Verás ... cada máquina requiere un motor distinto como te dije previamente, por lo tanto, siempre habrá algunos repetidos, pero dependiendo de la función necesitaremos uno u otro motor (específico).
- Ya veo. Pero estos motores no están funcionando todo el tiempo o el primero que entra pone en marcha la producción y todo a funcionar.
- Claro que no, eso no sería eficiente.
- Entonces hay operarios que controlan los motores todo el tiempo y deciden cuando activarlos, eso debe ser muy caro.
- No y sí, ahora se lo explico mejor, Lorenzo. La principal función de los operarios es poner en marcha el conjunto de máquinas y pararlas en el caso de emergencia. Con los dispositivos de mando y protección conseguimos ese cometido. Además, para el correcto funcionamiento de los motores, tenemos sensores, reguladores y actuadores.
- De acuerdo, pero parece muy complicado.
- En realidad no lo es tanto. Básicamente, tenemos las máquinas que hacen el trabajo y para que lo hagan bien, tenemos que cuidar de ellas. Este cometido lo conseguimos al asegurarnos que todos los sensores y demás controladores funcionen correctamente. Ahora le explico en qué consisten.
El mando de los motores eléctricos consiste en realizar el arranque, la regulación de velocidad, el frenado, la inversión del sentido de marcha, así como el mantenimiento del régimen de su funcionamiento, de acuerdo con las exigencias del proceso tecnológico.
En los casos más sencillos, el arranque, la regulación de velocidad y el frenado, se realizan por medio de dispositivos accionados manualmente: interruptores de cuchillas, reostatos de arranque y de regulación, combinadores, etc. La utilización de estos dispositivos implica una pérdida de tiempo suplementaria y, por lo tanto, reduce la productividad de la máquina, sobre todo, cuando su funcionamiento está relacionado con frecuentes arranques o con una regulación de la velocidad. Además el empleo de dispositivos accionados directamente excluye el mando a distancia, lo que resulta inconcebible en numerosas instalaciones industriales modernas.
Finalmente, para los sistemas de potencia elevada, el mando directo resulta difícil y, en ocasiones, imposible, a causa de los grandes esfuerzos que serían necesarios para asegurar la maniobra de los aparatos. La necesidad de eliminar los defectos del mando directo, ha conducido a la creación de aparatos de mando automático. El mando automático de los motores eléctricos es una de las condiciones fundamentales del crecimiento de la productividad de las máquinas y de la fabricación de productos de alta calidad. Para el mando de motores eléctricos los más empleados son los dispositivos a base de relés y contactores. Pero, en numerosos casos, estos elementos no pueden responder a todas las exigencias que presentan los modernos procesos de producción, en lo que se refiere al mando eléctrico. Esta circunstancia explica la aparición de nuevos dispositivos automáticos.
Un sensor es todo aquello que tiene una propiedad sensible a una magnitud del medio, y al variar esta magnitud también varia con cierta intensidad la propiedad, es decir, manifiesta la presencia de dicha magnitud, y también su medida.
Los principales sensores para las máquinas eléctricas son para saber su posición y velocidad, también hay sensores para saber el estado de la máquina, como la temperatura o la presión. En nuestro caso también podemos tener en cuenta los sensores de caudal, ya sea para las turbinas.
Los principales tipos de sensores con los que trabajaremos serán:
Sensores de posición
Potenciómetro: Nos da un valor de tensión en función de la cual sabremos la posición.
Encoder: Es un elemento digital que transforma los pulsos que recibe en una posición angular.
Sensor de velocidad:
Tacómetro: Dispositivo que mide la velocidad de giro de un eje (R.P.M.), normalmente la velocidad de giro de un motor.
Encoder: De la misma manera que antes, puede traducir los pulsos recibidos en una velocidad.
Sensor de temperatura:
RDT: detector de temperatura resistivo, es decir, un sensor de temperatura basado en la variación de la resistencia de un conductor con la temperatura.
Termistor: es un tipo de resistencia (componente electrónico) cuyo valor varía en función de la temperatura de una forma más acusada que una resistencia común, hay NTC (decrementan su resistencia a medida que aumenta la temperatura) y PTC (incrementan su resistencia a medida que aumenta la temperatura)
Sensor de presión:
Piezoeléctrico: Es un material que en base a la deformación sufrida por una presión nos da un valor de voltaje a partir del cual podemos determinar la presión existente.
Sensor de caudal:
Caudalímetro venturi: reduce la sección y cambia la presión del fluido, con esa variación se determina el caudal.
Turbina: Se acopla una turbina que genera un campo magnético el cual lo medimos y conseguimos saber el caudal a partir de la velocidad.
El efecto Hall es una propiedad que tienen los conducto-res o semiconductores para generar un campo eléctrico en sus extremos cuando siendo atravesados por una corriente, se aproximan a un campo magnético. La tensión generada es la información que aporta el sensor, siendo usada para control de posición (medida de posición) o medida de corriente.
5.2.- Reguladores transformadores
Como ya sabrás, la relación de transformación (m) de los transformadores de tensión depende del número de espiras del bobinado primario (Np) entre el número de espiras del bobinado secundario (Ns), tal y como se ilustra en el siguiente diagrama. Además, se indica que la relación de transformación coincide con la relación entre la tensión del primario (Vp) entre la tensión del secundario (Vs) y que también es igual a la corriente de secundario (Is) entre la corriente de primario (Ip). En el diagrama se presentan también las fuerzas electromotrices de primario (Ep) y de secundario (Es).
Recordado lo anterior, la forma de regular la relación de transformación de los trafos es cambiando el número de espiras, bien del primario, bien del secundario. Si se desea que esta regulación se haga con facilidad, debemos disponer de tomas intermedias intercaladas en una de las bobinas del transformador, sacando hacia el exterior esa conexión eléctrica. De esta forma reducimos el número de espiras y cambiamos la relación de transformación.
Evidentemente, es válida la realización de tomas intermedias en cualquiera de los dos bobinados, pero lo más apropiado es hacerlo en el bobinado que tiene la tensión más alta, dado que por él circulará la corriente más baja y por ello los hilos del bobinado serán más flexibles (menor sección) y será más fácil la realización de la toma intermedia. Además, al llevar menos corriente, los terminales son más pequeños y existe menos riesgo de malas conexiones y puntos calientes.
La regulación más básica consiste en cambiar manualmente las conexiones eléctricas de las tomas intermedias del primario, para lo cual se requiere trabaja sin tensión y con la máquina puesta a tierra.
Otra opción de regulación, muy utilizada en transformadores de distribución, es la de disponer de un conmutador manual en el primario del trafo que selecciona una de varias relaciones de transformación. De esta forma, el mismo transformador puede ser instalado en líneas de diferentes tensiones (debido a las caídas de tensión en las líneas) manteniendo lo más constante posible la tensión deseada de salida dentro de los límites reglamentarios (±7% en líneas de BT ).
En líneas de transporte de alta tensión, es necesario mantener la tensión lo más constante posible, independientemente de la caída de tensión existente debido a la carga conectada en cada momento. En las subestaciones que unen líneas de transporte de energía eléctrica de alta tensión, se coloca un dispositivo especial en el primario de los transformadores, llamado relé Jansen, que regula automáticamente el conmutador que cambia la relación de transformación y mantiene la tensión de línea lo más constante posible.
Para saber más
La siguiente web de una empresa fabricante de motores entre otros elementos, nos explica de forma más sencilla lo que es un regulador de velocidad, o variador de frecuencia. Aconsejo encarecidamente ver el vídeo de 3 minutos.
Wikioedia. Esquema de un regulador de frecuencia(CC0)
En muchos procesos industriales es posible variar el proceso variando la velocidad de los motores. Por ejemplo en un bombeo de agua si variamos la velocidad del motor que acciona la bomba podemos hacer que el caudal aumente o disminuya a voluntad. En una refrigeración por ventilación, variando la velocidad del ventilador logramos refrigerar más o menos. En definitiva existen multitud de procesos donde variando la velocidad de los motores eléctricos se produce una actuación gradual en el proceso.
En la actualidad los motores más utilizados son los de inducción, que son motores de ca con rotor en jaula de ardilla (rotor cortocircuitado) . Es por eso que se ha diseñado un bloque electrónico llamado variador de velocidad o convertidor de frecuencia para cambiar la velocidad, con una señal de consigna, de estos motores.
Un variador de velocidad consta de tres partes, un rectificador para convertir la corriente alterna en continua, un filtro para estabilizar la tensión continua y un ondulador que convierte la tensión continua en alterna de tensión y frecuencia variables. Existen variadores con alimentación monofásica para motores de pequeña potencia y trifásicos para el resto.
Estos variadores son programables donde se puede controlar las rampas de aceleración o deceleración, velocidad mínima o máxima, entre otras variables.
Wikipedia. Pasos ante variación de carga en alternador(CC0)
Regulador de alternador
Como te imaginarás, al producirse variaciones en la carga de un alternador, es necesario regular el sistema máquina motriz-alternador, actuando sobre la excitación del alternador, para mantener la tensión de la red constante, y en la potencia de la máquina motriz, para mantener la velocidad y en consecuencia la frecuencia constante.
La regulación manual puede ser aceptable en pequeños grupos electrógenos, pero en general la regulación es automática, tanto en tensión como en velocidad.
En el siguiente cuadro se resumen los pasos a dar ante la variación de la potencia en la carga para mantener estables la tensión y la frecuencia, es decir, un óptimo funcionamiento.
Debes conocer
En la siguiente web podemos ver cómo funciona el regulador del alternador o estabilizador de tensión, en un coche. En esta web se ve de forma más sencilla su funcionamiento y los tipos. Lo imprescindible es el funcionamiento.
Llamábamos actuadores a los que necesitan tensión de alimentación para su funcionamiento, dada por el automatismo, y que a su vez tienen contactos asociados que intervienen en el funcionamiento del automatismo. Son los contactores, relés y los temporizadores.
Contactor
Un contactor es un aparato electromecánico compuesto por un electroimán y unos contactos. Tiene la misión de permitir o interrumpir el paso de la corriente de fuerza que alimenta a los diferentes receptores a través de sus contactos de fuerza o de potencia. También dispone de otros contactos que intervienen en el funcionamiento del automatismo, por los que pasa poca corriente, llamados auxiliares. Su aspecto físico es el de la figura:
Internamente, el contactor está formado por un electroimán, compuesto por un núcleo ferromagnético, una bobina, una armadura, un muelle y unos contactos asociados. Cuando se le aplica tensión a la bobina, el electroimán atrae a la armadura y ésta hace que los contactos que estaban abiertos se cierren y los que estaban cerrados se abran. Cuando se deja de alimentar la bobina, el muelle hace que los contactos vuelvan a su posición inicial.
En el dibujo de la izquierda, la bobina no está alimentada y los contactos están abiertos. En el dibujo de la derecha, se alimenta la bobina, el campo magnético atrae la armadura y se cierran los contactos.
Cuando se pulsa el pulsador de marcha, llega tensión a la bobina del contactor KM1, cerrando los contactos de fuerza del circuito de potencia y poniéndose en marcha el motor. El contacto auxiliar NA (normalmente abierto) del circuito de mando, también se cierra, permitiendo el paso de la corriente a la bobina, con lo que el contactor sigue alimentado aunque se deje de pulsar la marcha S1. Este contacto se llama de realimentación. Para que deje de funcionar el motor, se debe de pulsar el pulsador de paro o saltar el guardamotor.
Temporizadores
Como ya se ha visto, los contactos de los contactores se abren o se cierran casi instantáneamente al dar tensión a la bobina. En algunas aplicaciones, se requiere que algunos contactos tarden en abrirse o en cerrarse un tiempo determinado. Los temporizadores son aparatos que cumplen esta misión. Existen muchos tipos de temporizadores, electrónicos, térmicos y neumáticos. Los dos primeros necesitan tensión de alimentación para que funcionen sus contactos. Los neumáticos se acoplan a un contactor y funcionan cuando se le da tensión a la bobina del contactor.
Electroválvulas, son elementos que permiten o no el paso de un fluido, (aire, agua, aceite..). Pueden ser de accionamiento todo-nada, o servoasistidas, dando un caudal en función de la tensión.
Relés de estado sólido Son interruptores para CA o CC cuyos elementos de conmutación son semiconductores. Pueden sustituir a los contactores en muchas aplicaciones de baja tensión siendo sus principales ventajas:
Ausencia de rebotes y desgastes mecánicos.
Protección contra choques vibraciones y ruidos.
Alta velocidad de conmutación y sus desventajas:
Menor robustez, lo que obliga a protegerlos adecuadamente contra sobrecargas, cortocircuitos y sobretensiones.
Según carga (inductiva o resistiva) distinto modelo.
Estos relés de estado sólido disponen externamente de los terminales de potencia, entre los cuales está el elemento o elementos conmutados a semiconductor, y los terminales de control, la actuación sobre los cuales va a permitirnos abrir o cerrar el circuito. Los circuitos de control y potencia están galvánicamente aislados.
Para saber más
La siguiente web es una página dedicada a dar información de electrónica, desde móviles a sensores y actuadores. El primer enlace es a la página principal de la web y el segundo es un pdf de esa web donde aparecen multitud de sensores y actuadores.
Como ya te imaginarás, por aparamenta eléctrica se entiende el conjunto de aparatos de maniobra, de regulación y control, de medida, incluidos los accesorios de las canalizaciones eléctricas, utilizados en las instalaciones eléctricas, cualquiera que sea su tensión. Aunque en su estudio, vamos a limitarnos a los más relevantes según el tipo de tensión:
En Baja Tensión:
Interruptor Automático (Q): Desconecta automáticamente la conexión eléctrica en caso de que el evento vigilado ocurriese. Suelen vigilar sobreconsumos (parte térmica) y cortocircuitos (parte magnética o instantánea). Tiene poder de corte elevado, para interrumpir cortocircuitos.
Interruptor diferencial(Q): Desconecta automáticamente la conexión eléctrica al sobrepasar la corriente diferencial residual asignada. No tiene gran poder de corte, sólo interrumpe corrientes nominales.
Contactor (KM): Contactor motor. Los contactos de potencia tienen poder de cierre y poder de corte.
Relé de maniobra (K): Contactos auxiliares, los contactos sólo son para señales eléctricas de mando o señalización.
Contacto auxiliar (KA): Contactos auxiliares de otro dispositivo.
Relé Térmico (F): Vigila la corriente de la máquina eléctrica o línea y hace una imagen térmica, si se sobrepasa, a través de sus contactos auxiliares da la orden de disparar al que tenga poder de corte.
Fusibles (F): Elemento más débil de un circuito eléctrico. Sólo soporta la corriente nominal.
Aparatos de medida (P): Amperímetro, voltímetro, fasímetro, frecuencímetro, analizador de redes, contador, trafos de tensión, trafos de corriente,sincronoscopio, termómetro, pirómetro, vibrómetro, etc.
Mando (S): Pulsador, conmutador, selector, telerruptor, temporizador, etc.
Detección (B): Final de carrera, detector de proximidad, barrera fotoeléctrica, etc.
Convertidor de frecuencia o arrancador (U): Variadores de alterna y de continua, arrancadores suaves, reguladores de intensidad luminosa, etc.
En Alta tensión:
Son cajas cuadradas con un número identificativo en su interior, este número es definido por las normas ANSI, a continuación se relacionan las más importantes:
Interruptor (52): Interruptor de SF6 para circuitos de alta tensión.
Seccionador (89L y 89T): Seccionador de línea y seccionador de puesta a tierra.
Pararrayos y Autoválvula: Cuando la tensión sobrepasa el umbral tarado, baja súbitamente su resistencia y pone esa línea directamente a tierra. Se utiliza para protecciones contra descargas atmosféricas.
Relés de protección: Algunos son: Mínima Tensión (27); Cortocircuitos (50); Sobreconsumos (51); Máxima o mínima frecuencia (81M/m); Diferencial (87) entre otras.
Transformadores de tensión: Encargados de rebajar la tensión para poder medirla y garantizar el aislamiento para la seguridad.
Transformadores de intensidad: Encargados de adaptar la corriente de línea nominal a 5A de salida y garantizar el aislamiento para la seguridad.
Relé Buchholz (63-71): Vigila que el transformador de potencia no tenga gases en el aceite, que tenga nivel de aceite y la presión del aceite.
Autoevaluación
Retroalimentación
Falso
Muy bien, son bloques compactos que funcionan como interruptores en alta tensión.
5.3.2.- Protecciones
En todo automatismo, al igual que en toda instalación eléctrica, debe de haber unos dispositivos de protección, de los receptores, de la propia instalación y de las personas. Aquí estudiaremos los elementos de protección de la instalación y de los receptores, que en nuestro caso serán motores eléctricos. En un automatismo se pueden producir dos tipos de defectos eléctricos, las sobrecargas y los cortocircuitos.
Una sobrecarga se produce cuando por la instalación y el motor circula una corriente mayor que aquella para la que se ha diseñado, llamada nominal. Una sobrecarga se produce cuando al motor se le exige un esfuerzo mayor que el que puede dar, o cuando falla una fase y es alimentado el motor con las otras dos. Una sobrecarga produce calentamiento en los conductores y acorta la vida del motor, pudiéndose quemar.
Un cortocircuito se produce cuando se conectan directamente dos fases o fase y neutro. Un cortocircuito provoca intensidades muy elevadas, pues la resistencia de los conductores es baja. Los cortocircuitos deben de cortarse en un intervalo de tiempo muy corto, de lo contrario, destruye la instalación.
En los automatismos nos podemos encontrar dos configuraciones para la protección de los motores. Una es la formada por fusibles y relés térmicos y otra la formada por magnetotérmicos. La primera es más antigua, la tendencia es a emplear la segunda configuración.
Fusibles: Los fusibles o cortacircuitos fusibles, son dispositivos de protección que abren el circuito en el que están instalados cuando la intensidad que lo atraviesa rebasa un cierto valor durante undeterminado tiempo. La apertura o interrupción se realiza por fusión de los elementos calibrados que tienen en su interior.
Interruptores automáticos: Dispara automáticamente al ocurrir el evento vigilando, suelen ser magnetotérmicos porque vigilan la parte magnética (cortocircuitos) y la parte térmica (sobreconsumos), aunque los hay sólo magnéticos y sólo térmicos. Pueden ser de 1 polo más neutro, de 2 polos, de 3 polos más neutro o de 4 polos, en función del número de contactos que realmente estén vigilados.
Interruptores diferenciales: Controla o vigila que la corriente que va hacia un circuito vuelva por el mismo circuito, en caso contrario hubo fugas, y si éstas pasan del umbral llamado "corriente diferencial residual" darán la orden de disparo o dispararán directamente. No suelen tener poder de corte para un cortocircuito, sólo pueden cortar corrientes nominales.
Relé térmico: Un relé térmico es un dispositivo de protección que detecta sobreintensidades por medio de un dispositivo térmico. El elemento detector del relé térmico es una lámina compuesta por dos metales soldados, cuyos coeficientes de dilatación térmica son diferentes. Su calentamiento provocado por la intensidad que los recorre (caldeo directo) o que los caldea indirectamente, provoca un curvamiento de la lámina hacia el lado opuesto al metal que más se dilata.
Guardamotor: Conjunto formado por el relé térmico y un contactor.
Funcionamiento de un guardamotor
Medidor de aislamiento: Se suele utilizar en esquemas de distribución tipo "IT" en lugar de las diferenciales.
Relé de orden de sucesión de fases: Utilizado para controlar que los motores no puedan girar al revés.
6.- Circuitos de mando y potencia
Caso práctico
- Sé que vas a juzgarme como el hombre más pesado del mundo y con derecho; pero necesito estar bien informado para la presentación ante la Junta y al ser un tema que no controlo, pues ... aún tengo otra pregunta. Porque hay algo que no me acaba de quedar claro. Los motores, creo ... que tenían que arrancar primero a una tensión y luego a otra ¿correcto?. Entonces, ¿no hay instrumentos entre todos los comentados previamente que puedan hacer eso?
- Si, y tienes toda la razón del mundo. No lo he explicado, porque en la mayoría de los casos, se realiza el montaje de un cuadro para conseguir lo que ha comentado.
- Es decir, que los electricistas lo montan para cada motor, ¿no?
- Precisamente, el arranque estrella triángulo es lo más habitual, llevan unos contactores que se abren o cierran accionados por pulsadores y temporizadores (lo llamado mando) y los contactores dan servicio a los motores (fuerza). Aunque no se ejecuta para todos los motores, sino solo para los de mayor potencia. Primero se trabaja a mayor tensión para la que intensidad de arranque no queme el motor y luego se trabaja a la tensión para la que está preparado el motor incrementando su durabilidad.
- Pero entonces, ¿el arranque estrella triángulo no es el único?
- No, y como pareces tan interesado en el tema…
A continuación se ilustran algunas conexiones típicas de máquinas eléctricas con esquemas desarrollados. Todas las conexiones eléctricas son referenciadas con un número que define hilos con el mismo potencial, es decir, cada hilo de conexión firmemente unido lleva el mismo número identificativo y si pasa a través de un dispositivo que pueda interrumpir el contacto eléctrico sin medios mecánicos llevará una identificación diferente.
Cuando en un plano eléctrico no caben las conexiones de un mismo circuito eléctrico, éstas se referencian enviando y recibiendo a través de flechas. En el envío se indica el número de plano al que va la conexión y la zona del plano a dónde va (fila y columna), y en la recepción se indica de qué plano viene y de qué sección del plano viene (fila y columna). Por ejemplo la del plano 1 sección A2 se envía un hilo al plano 3 sección B4, en la flecha de envío se pondrá 03/B4 y en la de recepción 01/A2.
Dentro de cada plano, un mismo componente con contactos eléctricos repartidos en distintas zonas del plano se referencian de la misma forma, indicando el mismo número de plano y la zona en la que están las diferentes partes vinculadas, separadas por una barra. Este tipo de referencia se puede observar varias veces en los planos anteriores.
 En esta ocasión nos encontramos a Carlos y Lorenzo hablando en el emplazamiento de las futuras instalaciones hidroeléctricas. Al acercarnos comenzamos a escuchar la conversación.
En esta ocasión nos encontramos a Carlos y Lorenzo hablando en el emplazamiento de las futuras instalaciones hidroeléctricas. Al acercarnos comenzamos a escuchar la conversación.

 - Nosotros generaremos electricidad a partir del agua, de ahí el nombre de central hidroeléctrica. Entonces, tenemos las turbinas conectadas a los generadores, los cuáles; transforman la energía mecánica proveniente del movimiento que arrastra las turbinas en energía eléctrica.
- Nosotros generaremos electricidad a partir del agua, de ahí el nombre de central hidroeléctrica. Entonces, tenemos las turbinas conectadas a los generadores, los cuáles; transforman la energía mecánica proveniente del movimiento que arrastra las turbinas en energía eléctrica. 

 - Entonces, como le iba diciendo; la generación de energía eléctrica la conseguimos a través de las turbinas conectadas a los generadores.
- Entonces, como le iba diciendo; la generación de energía eléctrica la conseguimos a través de las turbinas conectadas a los generadores.
















































{kind=link}